
As part of the Biomedical Engineering curriculum at the University of South Carolina, all seniors participate in creating a senior design project. Students were tasked with examining the current healthcare market and finding an area which they want to improve. Our group decided, after speaking with a surgeon at Prisma Health, that there was a need to create a handheld bone indentation device capable of assessing if a bone screw will hold during surgery.
Our group was to make a fully functional prototype of a bone indentation, within the scope of an engineering class and a budget of $1000, and perform verification/validation tests of the device all while maintaining proper documentation in a Design History File.
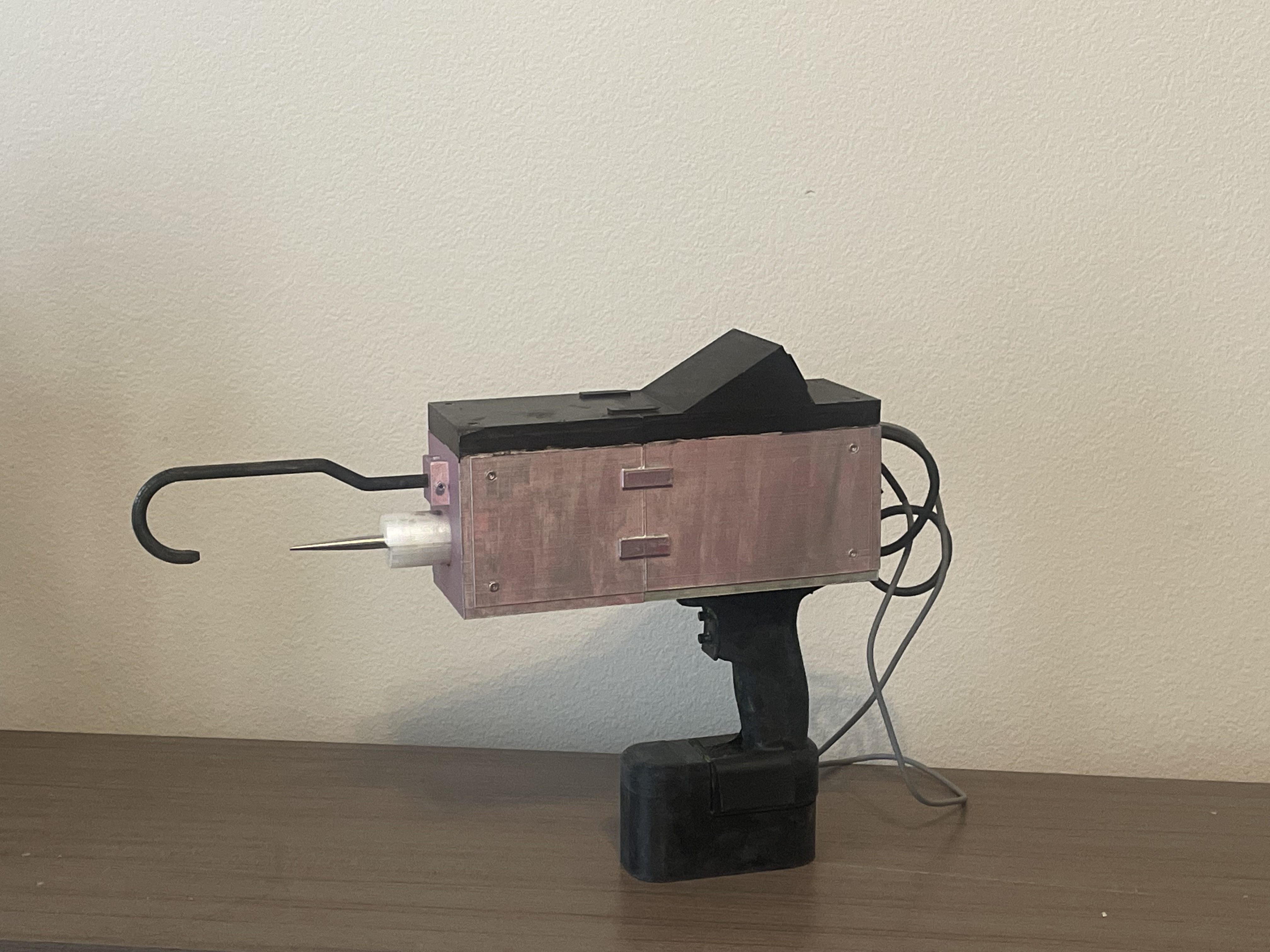
A semi functional prototype was created capable of displaying the length the bone indenter has displaced onto an on board LCD screen.
Current bone indentation devices are typically bulky and expensive. Our group designed a handheld device capable of being brought into the operating room.
The device works by a motor driven linear actuator indenting 1/32" into a bone and displaying the force created to a LCD screen for the user to read. In theory, the device would be sampled on various types of bones which would then have bone screws drilled into them. This would allow for a comparison of force levels to success rates of bone screws and their pullout strengths.
The mechanical components of the device consists of a motor that drives a linear actuator which is attached to the indenter probe. Attached to the linear actuator is a displacement sensor capable of measuring the distance the actuator has moved. These components are attached to a breadboard and Arduino board that control the LCD screen and receive input from the function buttons. These components are powered by a 12V battery and a converter that steps the voltage down to 5V for the Arduino and less demanding components.
This project was designed to improve the current market of handheld bone indentation devices so that they may be used to identify whether a bone could sustain a bone screw. It also helped to build the design, documentation, and manufacturing skills of my group and I and shows the cumulative knowledge of my undergraduate degree.
| Skills Demonstrated | Project Artifacts |
|---|---|
| Technical Writing and Design Documentation | Design History File |
| Soldering | See Images Below |
| Arduino IDE | See Code Below |
| IP/Patent Law | Provisional Patent |
// Define the number of buttons
const int numButtons = 3;
const int analogPin = A1;
#include
// Pin numbers for the buttons
const int buttonPins[numButtons] = {A2, 5, 4}; // Example pins, modify as needed
// Button states and variables for each button
int buttonStates[numButtons] = {HIGH};
int lastButtonStates[numButtons] = {HIGH};
unsigned long lastDebounceTimes[numButtons] = {0};
unsigned long holdStartTimes[numButtons] = {0};
const unsigned long holdDuration = 1000; // Duration threshold to consider the button as held (in milliseconds)
const unsigned long debounceDelay = 50; // Delay time to debounce the button
LiquidCrystal lcd(12, 11, 10, 9, 8 ,7);
// Pins for motor a
const int dirPin = 2;
const int stepPin = 3;
const int stepsPerRevolution = 5000;
float calcValue=0;
void setup() {
lcd.setCursor(0, 0);
Serial.begin(9600); // Initialize serial communication
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// Clears the LCD screen
lcd.clear();
lcd.print("Welcome to");
lcd.setCursor(0, 1);
// Print a message to the LCD.
lcd.print("InnoDent!");
// Declare motor pins as Outputs
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
// Set button pins as input with internal pull-up resistors
for (int i = 0; i < numButtons; i++) {
pinMode(buttonPins[i], INPUT_PULLUP);
}
}
void loop() {
// Check all buttons
for (int i = 0; i < numButtons; i++) {
checkButton(i);
}
}
// Function to check button state
void checkButton(int buttonIndex) {
int reading = digitalRead(buttonPins[buttonIndex]); // Read the state of the button
// Check if the button state has changed
if (reading != lastButtonStates[buttonIndex]) {
lastDebounceTimes[buttonIndex] = millis(); // Update the debounce time
}
// Check if debounce delay has passed
if ((millis() - lastDebounceTimes[buttonIndex]) > debounceDelay) {
// Check if the button state has changed and is stable
if (reading != buttonStates[buttonIndex]) {
buttonStates[buttonIndex] = reading; // Update the button state
// Check if the button is pressed
if (buttonStates[buttonIndex] == LOW) {
holdStartTimes[buttonIndex] = millis(); // Record the start time of the hold
buttonPressed(buttonIndex); // Call function for button press
} else {
// Button is released, reset hold start time
holdStartTimes[buttonIndex] = 0;
buttonReleased(buttonIndex); // Call function for button release
}
}
}
// Check if the button is being held down
if (buttonStates[buttonIndex] == LOW && millis() - holdStartTimes[buttonIndex] >= holdDuration) {
buttonHeld(buttonIndex); // Call function for button hold
}
lastButtonStates[buttonIndex] = reading; // Update the last button state
}
// Function to handle button press
void buttonPressed(int buttonIndex) {
Serial.print("Button ");
Serial.print(buttonIndex);
Serial.println(" pressed!");
// Execute different actions based on the button index
if (buttonIndex == 0) {
// Action for button 0
// Your code here
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Starting Test");
delay(1000);
test();
//lcd.clear();
//lcd.setCursor(0, 0);
//lcd.print("Force Reading:");
//lcd.setCursor(0, 1);
//lcd.setCursor(0, 1);
//lcd.print("75 N");
//delay(5000);
} else if (buttonIndex == 1) {
// Action for button 1
// Your code here
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Forward");
delay(1000);
forward();
} else if (buttonIndex == 2) {
// Action for button 2
// Your code here
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Backward");
backward();
}
}
// Function to handle button release
void buttonReleased(int buttonIndex) {
Serial.print("Button ");
Serial.print(buttonIndex);
Serial.println(" released!");
// Your code here for what you want to happen when the button is released
lcd.setCursor(0, 0);
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// Clears the LCD screen
lcd.clear();
lcd.print("Welcome to");
lcd.setCursor(0, 1);
// Print a message to the LCD.
lcd.print("InnoDent!");
}
// Function to handle button hold
void buttonHeld(int buttonIndex) {
Serial.print("Button ");
Serial.print(buttonIndex);
Serial.println(" held down!");
// Your code here for what you want to happen when the button is held down
float sensorValue = analogRead(analogPin); // Read the value from the analog pin
Serial.println(sensorValue); // Print the value to the serial monitor
delay(500); // Wait for a second before reading again
calcValue = (sensorValue/1023) * 2;
// lcd.clear();
// lcd.setCursor(0, 0);
// lcd.print("Displacement:");
// lcd.setCursor(0, 1);
Serial.println(calcValue);
// lcd.print(calcValue);
// lcd.print(" Inches");
delay(100);
}
//Function to Perform Test
void test() {
// Set motor direction clockwise
digitalWrite(dirPin, HIGH);
const int testDelay(50000);
Serial.println("Going forwards");
float init_value = analogRead(analogPin);
float init_Voltage = (init_value/1023) * 4.70;
float init_displacement = (0.3901*init_Voltage) + 0.0144;
float max_dis = init_displacement + 0.03;
// spin motor
int x = 0;
unsigned long startTime = millis();
while(x < stepsPerRevolution)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(testDelay);
digitalWrite(stepPin, LOW);
delayMicroseconds(testDelay);
unsigned long programTime = millis();
unsigned long runTime = programTime - startTime;
x++;
float sensorvalue = analogRead(analogPin);
float voltage = (sensorvalue/1023) * 4.70;
float displacement = (0.3901*voltage) + 0.0144;
float currentDisplacement = displacement - init_displacement;
if(runTime >= 5000 || displacement >= 1.846)
{
digitalWrite(stepPin, LOW);
Serial.print(runTime);
break;
}
}
float sensorvalue = analogRead(analogPin);
float voltage = (sensorvalue/1023) * 4.70;
float displacement = (0.3901*voltage) + 0.0144;
float currentDisplacement = displacement - init_displacement;
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Displacement:");
lcd.setCursor(0, 1);
//Serial.println(displacement);
lcd.print(currentDisplacement, 3);
lcd.print(" Inches");
delay(1000); // Wait a second
}
//Function to Drive Motor Forward
void forward() {
// Set motor direction clockwise
digitalWrite(dirPin, HIGH);
Serial.println("Going forwards");
const int stepDelay(300);
// spin motor
int x = 0;
while(x < stepsPerRevolution)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(stepPin, LOW);
delayMicroseconds(stepDelay);
x++;
float sensorvalue = analogRead(analogPin);
float voltage = (sensorvalue/1023) * 4.70;
float displacement = (0.3901*voltage) + 0.0144;
if(digitalRead(5) == HIGH||displacement >= 1.846)
{
digitalWrite(stepPin, LOW);
// displacement = (analogRead(analogPin)/1023) * 2;
break;
}
}
delay(100); // Wait a second
}
//Function to Drive Motor Forward
void backward() {
// Set motor direction counterclockwise
digitalWrite(dirPin, LOW);
Serial.println("Going Backwards");
const int stepDelay(300);
// Spin motor quickly
int x = 0;
while(x < stepsPerRevolution)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(stepPin, LOW);
delayMicroseconds(stepDelay);
x++;
float sensorvalue = analogRead(analogPin);
float voltage = (sensorvalue/1023) * 4.70;
float displacement = (0.3901*voltage) + 0.0144;
if(digitalRead(4) == HIGH||displacement <= 0.10)
{
digitalWrite(stepPin, LOW);
break;
}
}
delay(100); // Wait a second
}